Ich bin vor einiger Zeit auf eine Direktextruderlösung bei meinem Ender 5 umgestiegen und habe bisher keine negativen Aspekte, aber viele positive gefunden.
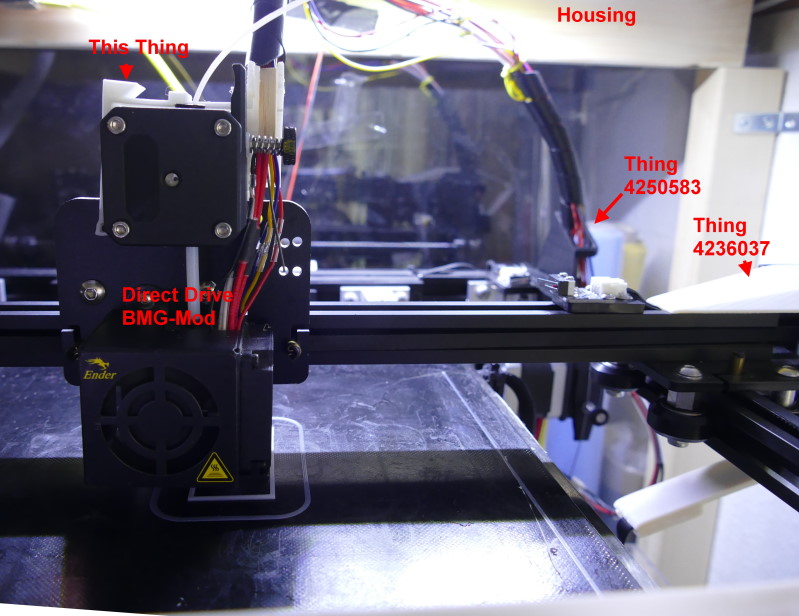
Allerdings habe ich für den Umstieg ein paar Konstrukionen entwickeln müssen, um die Kabel sauber führen zu können.
Die will ich hier für den Nachbau vorstellen.
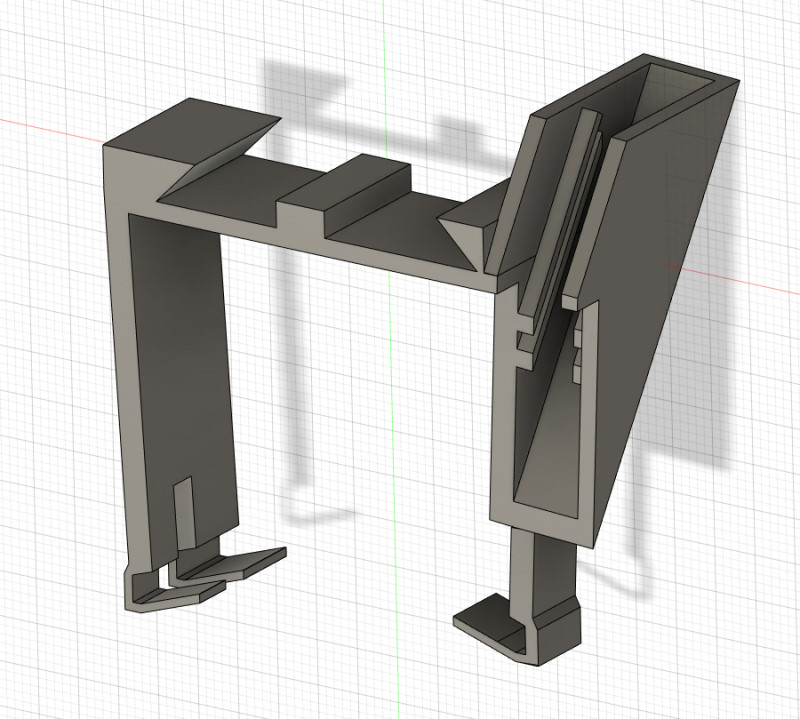
Die erste Konstruktion betrifft die Kabelführung der X-Achse (Motor und Schalter). Dazu habe ich einen Halter konstruiert, der zwei Funktionen erfüllt. Zum einen leitet er die Kabel definiert nach unten zum Mainboard ab. Früher hatte sich das Kabel auch öfter am Filamentbehälter verheddert (war aber die Bowden-Extruder-Lösung). Zum zweiten verhindert die Kopfform, dass sich die Kabel des Extruders/Lüfter/Hotends am Stepper der X-Achse verhaken.
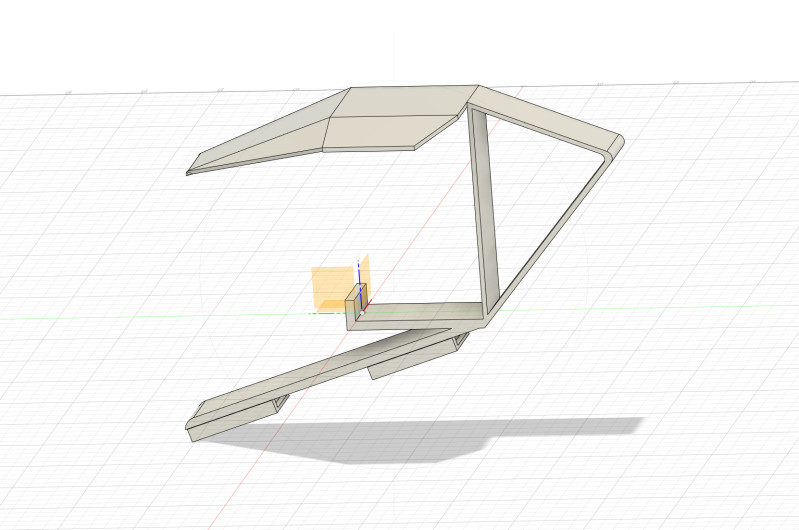
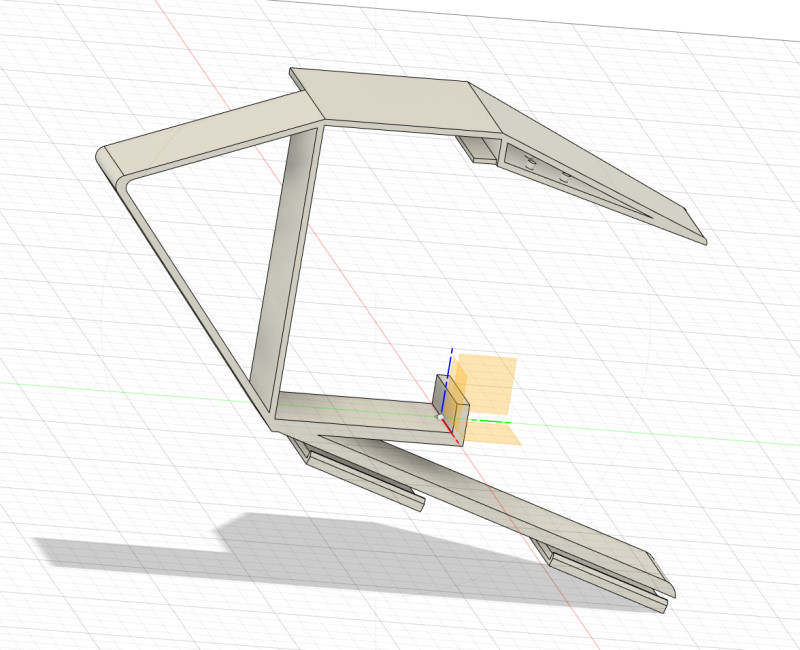
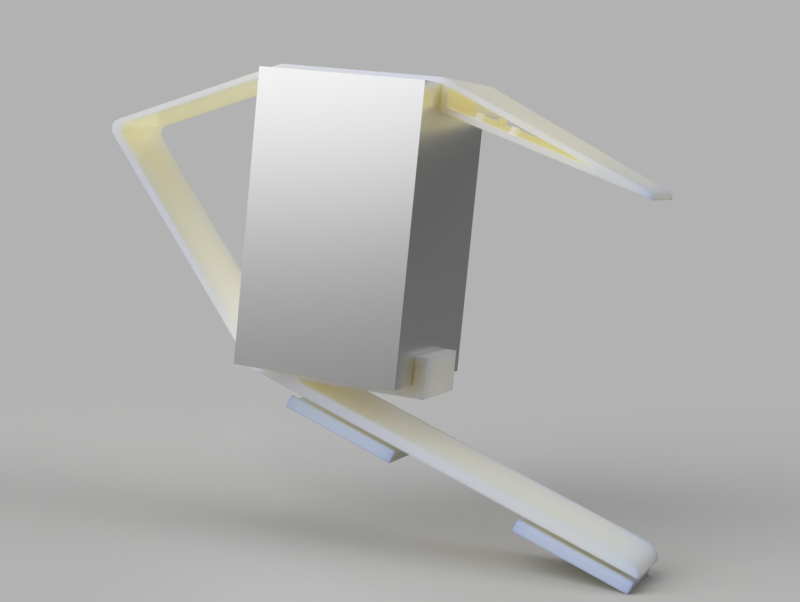
Hier eine Simulation des Bauteils:
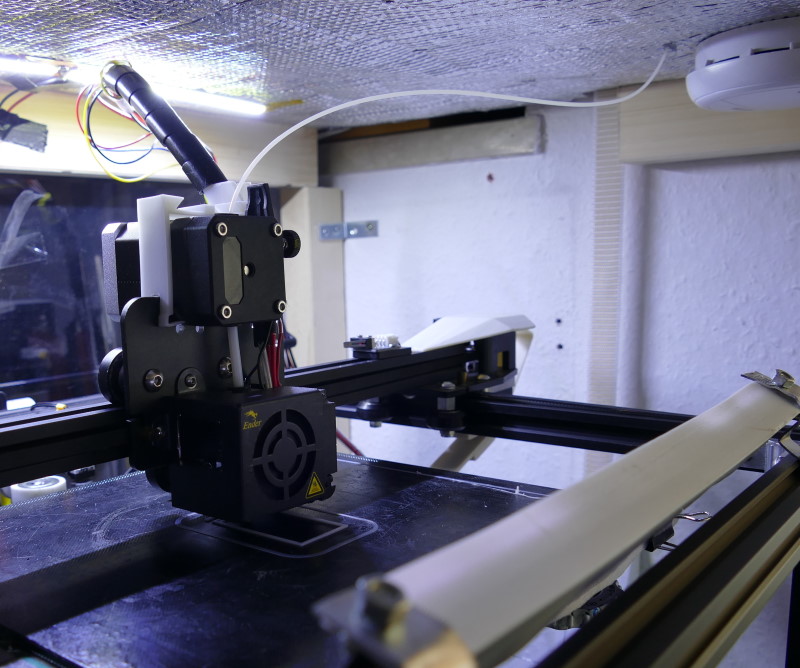
...und so sieht es dann in echt aus:


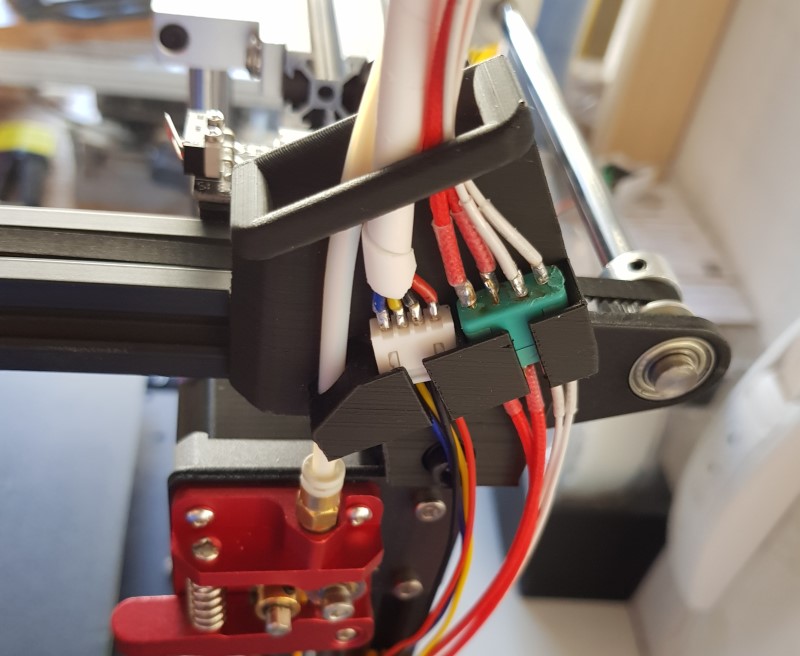
Die zweite Lösung ist ein definierter Kabelaustritt der Kabel an einer Ecke des Druckers. Zusätzlich habe ich den Halter so gebaut, dass das Hotend schnell wechselbar ist. Die Hotend-Heizung und der Temperaturfühler habe ich über einen MPX-Stecker aus dem Modellbaubereich steckbar gemacht. Die beiden Lüfter sind ebenfalls über 2,54mm Stecker steckbar. Zu guter Letzt ist an der Stelle der Extruder-Motor gesteckt. Dadurch kann der Drucker super schnell zwischen Direktextruder, Bowdenextruder, Bore 4.1 Hotend und Allmetal-Hotend gewechselt werden. Eine Nebenbedingung war, dass die beiden Extruder für Bowden- und Direktbetrieb identisch sind damit keine Extrusionsraten geändert werden müssen. Ich habe einfach zwei BMG-Clone gekauft.
Von dem Halter gehen die Kabel in einen Spiralschlauch, in den ich zum besseren Legen des Kabels noch ein 0,5mm Stahldraht eingefügt habe. Dieser ist nötig, weil die Kabel bei geschlossener Einhausung und 40°C sehr weich werden und dann eventuell irgendwo zum Liegen kommen, wo sie nicht hin gehören. Mit dem Stahldraht (Federstahl) ist dieses Problem Geschichte.
Der Halter sollte auch die Ecke vom Ender so abdecken, dass sich nichts verfangen kann.
Hier drei Bilder aus der Simulaiton:

Hier ein paar Prototypenbilder, bis alles gepasst hat:

Das finale Teil habe ich mit dem Tree-Support gedruckt:

Vom Support befreit:

So sieht der Halter montiert aus:
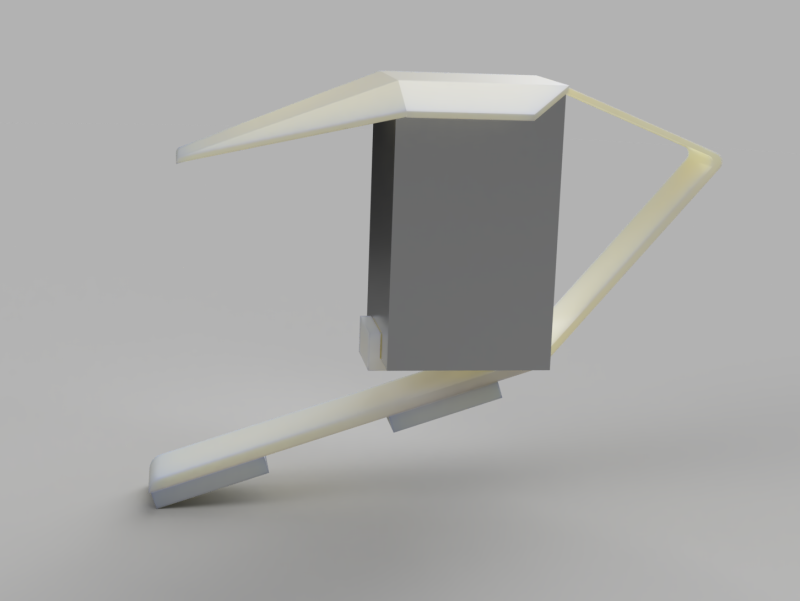
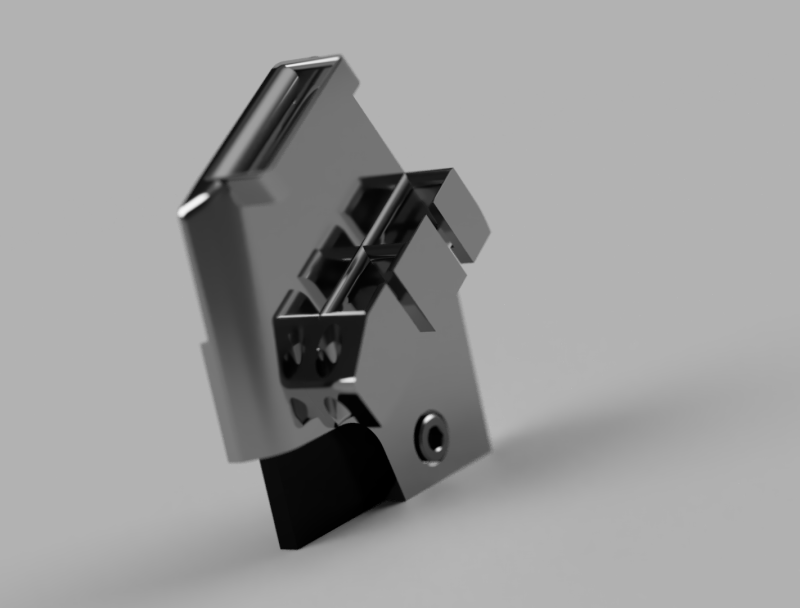
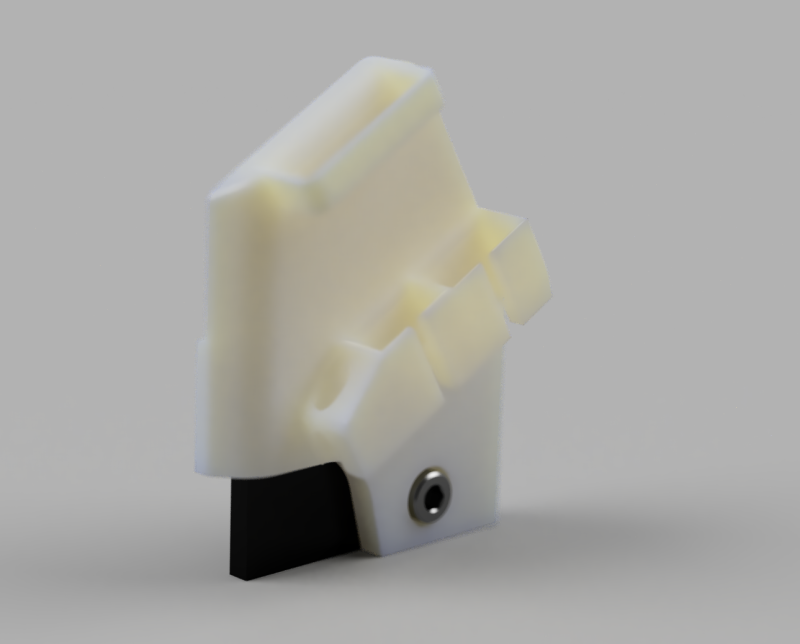
Die dritte Konstruktion definiert den Kabeleintritt am Hotend. Der Halter wird einfach über den Stepper-Motor geklippt, die Kabel und der Stahldraht in den Schacht gedrückt und mit dem Plättchen verschlossen. Die Schwalbenschwanznut dient einer späteren Erweiterung.
Hier die Konstruktion:
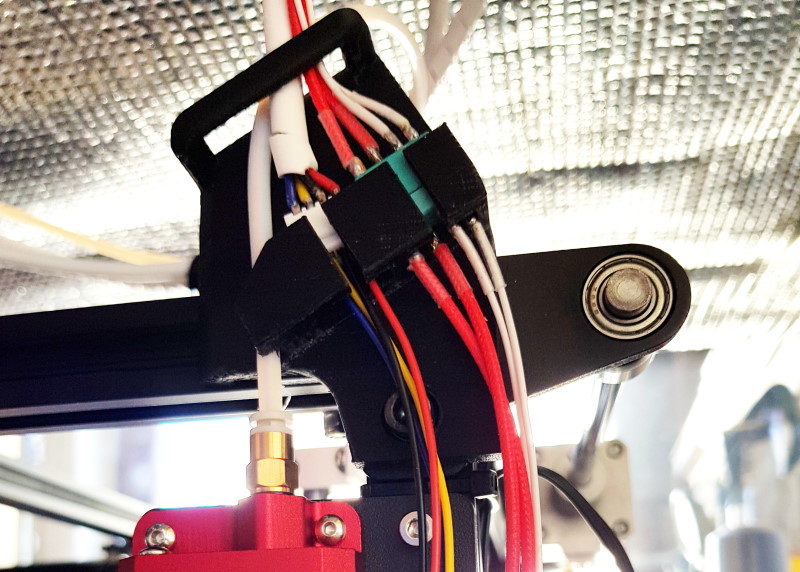
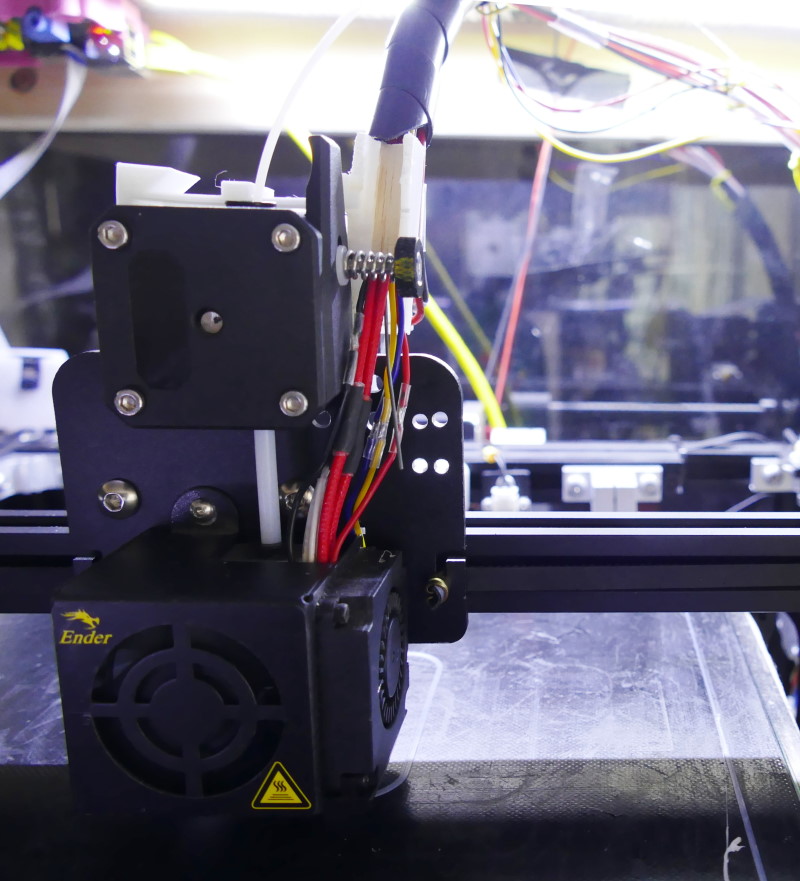
Hier der Halter im realen Einsatz:
Hier die STL-Files zum Herunterladen: